Wheel motors, mounted at both rear wheels (Fig. 6.12), is a variation of the configuration shown in Fig. 6.11. This arrangement eliminates the universal joint driveline, differential, and rear axle, with resultant cost and weight savings. Because the pump has low inertia, it is often possible to provide enough starting torque to start the engine with a direct-coupled pump. (The swashplate control would have to be set in the neutral position.) A clutch is needed if cold starting is a major consideration, i.e., very low ambient temperature. Later in this chapter, a gearbox with multiple pump mounts is discussed. Sometimes a clutch is not needed even when several pumps must be turned when the engine is started. In the following illustrations, the clutch is shown with the label, “for some applications.”
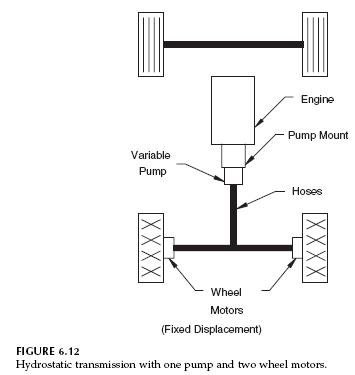
In Fig. 6.12, the wheels are mounted directly on the shaft of the motors. The low-speed, high-torque motor designs are used for wheel motors. However, the wheel motor is quite different from a standard hydraulic motor. It bolts directly to the frame of the vehicle; therefore, the housing has a structural mission relative to the vehicle, in addition to its mission relative to the operation of the motor. Wheel motors have a heavier housing. Also, the wheel motor bearings are the axle bearings for the vehicle. Wheel motors are designed for a high radial load, and care must be taken to ensure that the dynamic load during vehicle operation does not exceed the radial load rating.
On four-wheel-drive (4WD) vehicles, the wheels that steer are also powered. These wheels are subjected to thrust loads during turning; consequently, the wheel motor bearings must be designed for a thrust load in addition to the radial load. Also, hillside operation puts a thrust load on the wheel motor bearings. The loads the vehicle puts on the wheel motor bearings should be discussed with the wheel motor manufacturer before a selection is made.
Hoses or tubing carry the flow from the pump to the motors. A tee is used to divide the flow to the two wheel motors. When the vehicle turns, the pressure required to rotate the outside wheel is less; therefore, more flow goes to this wheel, and it rotates faster. This action accomplishes the same task as the differential.
With the configuration shown in Fig. 6.12, it is important to remember that speed obtained with a given flow is only one-half of the speed obtained with a single motor. On the other hand, using two wheel motors provide twice the total wheel torque. The configuration shown in Fig. 6.12 is useful for a relatively light vehicle that moves slowly but must have high tractive ability. An example would be an agricultural machine used to harvest a vegetable crop.